[컴선설] Lec 01 Linear Algebra
[컴선설] Lec 01 Linear Algebra
1. Linear Transformation
- Linear Transformation : $A{\mathbf x}={\mathbf b}$ form.
- Three cases : No solution / One solution / Infinite numbers of solution
Case A : No solution
- Given point ${\mathbf b}$ is not included in set of points spanned by $\mathbf {c_1, c_2, c_3}$
- Column vectors are not independent of each other
- $C(A)=\text{span}(A), {\mathbf b} \notin C(A)$
Case B : One solution
- ${\mathbf b} \in C(A), N(A)={\mathbf 0}$
- Column vectors are independent of each other.
Case C : Infinite solutions
- ${\mathbf b} \in C(A), N(A)\neq{\mathbf 0}$
- Column vectors are not independent of each other
2. Least Squares Method
- If the vector ${\mathbf b}$ not included in area spanned by column vectors, there’s no exact solution.
- Can find orthogonal projection $\hat {\mathbf b}$ to solve $A\hat {\mathbf x} = \hat {\mathbf b}$
- $\hat {\mathbf x}$ is least square solution of the $A{\mathbf x}={\mathbf b}$
2.1 Vector space
- = set of vectors
- 연산에 대해 닫혀있다 개념
- $\alpha {\mathbf a} + \beta {\mathbf b} = {\mathbf c}$ : for $\forall \alpha, \beta \in \R$
- Must include origin ($\mathbf 0$) to be a vector space
Span (or spanning set)
- ${\mathbf a}, {\mathbf b}$ 에 대해 $\alpha \mathbf a + \beta \mathbf b$ : Spanning set
3. Basis vector
- basis : vectors of the ‘minimum number’ that spans all points in original space
How to check linear independence
- given vector $\bf e_1, \bf e_2$, if there only exists trivial solution to $\alpha \bf e_1 + \beta \bf e_2 = 0$ ($\alpha = \beta = 0)$, $\bf e_1, \bf e_2$ are linearly independent
4. Find all solutions to linear system
Find Nullspace solution of Ax=b
- Find nullspace of matrix $A$
- $A \bf x =b$, $A\bf x = b+0=b$
- $\bf x_{complete} = x_{particular} + x_{null}$
- Using Gauss-Jordan Elimination → Pivot column을 non-pivot column으로 나타내기
- Number of pivot → rank / number of columns - rank = nullity (dimension of nullspace)
Find Complete solution of Ax=b
- solve with $\bf b$
- substitute 0 to null-space solution
5. Sub-space
- subset of original space. must include the origin
6. Elementary Matrix
- Matrix that expreses one elementary row operation
- 두 행 swap : Inverse는 자기자신 (Permutation matrix)
- 한 행에 다른 행의 scalar 배를 더하기 : Inverse는 다시 -scalar배 더한 elementary matrix
- 각 행을 scalar배 하기 : Inverse는 1/scalar배 하기
- determinent=1. swap한 경우만 -1
7. Gauss-Jordan Elimination
- RREF (Reduced Row Echelon Form) - Every pivot must be 1, pivot row must be zero except for the pivot
1
2
3
4
5
6
7
8
9
10
11
12
13
Gauss Jordan :
1. Make RREF
for column c:
swap nonzero pivot row to c
Multiply elementary matrix to remove value below pivot
make pivot value 1
make non-pivot value of the column zero
2. Solve nullspace solution
Solve RREF with Ax=0
remove pivot column value by substitution
3. Solve particular solution
solve for Ax=0
set non-pivot value 0
8. LU Decompositon
- Multiplying Elementry matrix on the left side of A makes it Upper triangular matrix
- $E_3E_2E_1Ax = UAx= E_3E_2E_1b$
- Let $L_{-1}=E_3E_2E_1$, $A=LU$
- $A=LU, LUx= b$
- $L{\bf y} = \bf b$ → Forward substitution
- $U{\bf x} = {\bf y}$ → Backward substitution
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
<LUdecomposition>
Procedure :
set pivot[i] = i
for column k :
find value in column k
swap
factor <- Aik / Akk
Aik <- factor
for row j=k+1 :
Aij -= factor * Akj
<LUsolve>
for row i:
sum = b[i]
for column j=i+1 :
sum -= Aij * x[j]
x[i] = sum
for row i=n-1 decreasing :
sum = x[i]
for column j=i+1 :
sum-=Aij * x[j]
x[i]=sum/Aii
return x[i]
9. Four fundamental Subspace
- $C(A)$ : Column space, spanned by linearly independent column vectors
- $N(A)$ : Nullspace, spanning set that satisfies $A{\bf x} = {\bf 0}$
- $R(A) = C(A^T)$ : Row space, spanned by linearly indepenedent row vectors (or Column space of $A^T$
- $\text{dim}C(A) = \text{dim}C(A) = \text{dim}R(A^T)=r$ (Rank of A)
- $\text{dim}N(A) = \text{nullity}(A) = n-r$ ( # of column - rank)
- $\text{dim}N(A^T) = \text{nullity}(A^T) = m-r$ (# of row - rank)
- Rank-nullity theorem : $\dim C(A) + \dim N(A) = \dim V$ : dimension of domain
- Also $\dim C(A^T) + \dim N(A^T) = \dim W$ : dimension of codomain
- $C(A) \perp N(A^T)$
- $C(A^T) \perp N(A)$
10. Rank 1 matrix
- All column (or row) lies along the same line : $\text{rank}(A) = 1$
11. Trace
- summation of diagonal terms = sum of eigenvalues
- $\text{tr}(A) = \sum \lambda_i$
12. Symmetric matrix
Properties
- Eigenvalues of symmetric matrix are real.
- Every real matrix $A$ can be diagonalized by an orthogonal matrix $Q$
- $A=QDQ^T$, ($Q^TQ=I$)
- Symmetry of quadratic form : ${\bf x^T}A {\bf x}$ is real scalar for real vector $\bf x$
- Positive-definiteness : if eigenvalues of $A $ are strictly positive, → positive definite, ${\bf x^T}A{\bf x}>0$ for all nonzero $\bf x$
13. QR Factorization (decompositon)
- $A = QR$
- $Q$ : orthogonal (or unitary) matrix where $Q^T Q = I$ or $Q^*Q=I$
- $R$ : upper triangular matrix
Application
- Find least squares problem $\min_x \vert\vert A{\bf x} - {\bf b} \vert\vert $ can be solved using QR factorization
- $QRx \approx b$, $Q^TQRx = Rx=Q^Tb$
- Numerical stability : preserves length and angles
- Easy to apply on Iterative Methods
Classical Gram-schmidt
- Takes columns of $A$, say $\bf a_1,a_2, \cdots, a_n$
- Orthogonalize them step by step
- Collect the normalized orthogonal vectors as columns of $Q$.
- Figure $R$ by computing $R= Q^TA$
- To handle numerical stability and to solve ill-conditioned matrix, use Householder matrix
- Provides stable way to work with systems without forming normal equations $A^TA$
1
2
3
4
5
6
7
Gram schmidt (Or QR Factorization)
1. Take columns of A, say a1, a2, ..., an
2. let q1 = a1 / |a1|, r11 = |a1|
3. let q2 = a2-(q1*a2)q1 / | a2-(q1*a2)q1 |,
r12 = q1*a2, r22 = | a2-(q1*a2)q1 |
4. let q3 = a3-(q1*a3)q1-(q2*a3)q2 / | a3-(q1*a3)q1-(q2*a3)q2 |
r13 = q1*a3, r23 = q2*a3, r33 = | a3-(q1*a3)q1-(q2*a3)q2 |
Shapes and Dimensions of QR
- $A (m\times n) = Q(m \times m)R(m\times n)$ : Full decomposition
- $A(m\times n) = Q_{reduced}(m\times n) R_{top}(n\times n)$ : economy-sized decomposition
- Example!
14. Singular Value Decomposition (SVD)
- For any real valued matrix $A (m \times n)$
where
- $U (m\times m)$ orthogonal (or unitary) matrix, $U^TU=I_{m\times m}$ (Left singular vectors of $A$)
- $\Sigma(m\times n)$ diagonal-like matrix (rectengular, only the diagonal terms are nonzero, singular values with descending order) $\sigma_1 \geq \sigma_2 \geq \cdots \geq 0$
- $V(n\times n)$ orthogonal (or unitary) matrix, $V^TV = I_{n\times n}$. Columns of $V$ are right singular vectors of $A$
Properties of SVD
- Singular values
- The numbers $\sigma_1, \sigma_2, \cdots$ on the diagonal of $\Sigma$
- Nonnegative and arranged in descending order
- rank
- $\text{rank} (A) = \text{# of nonzero singular values of }\Sigma$
- dimensions of $\Sigma$
- same dimensions as $A$
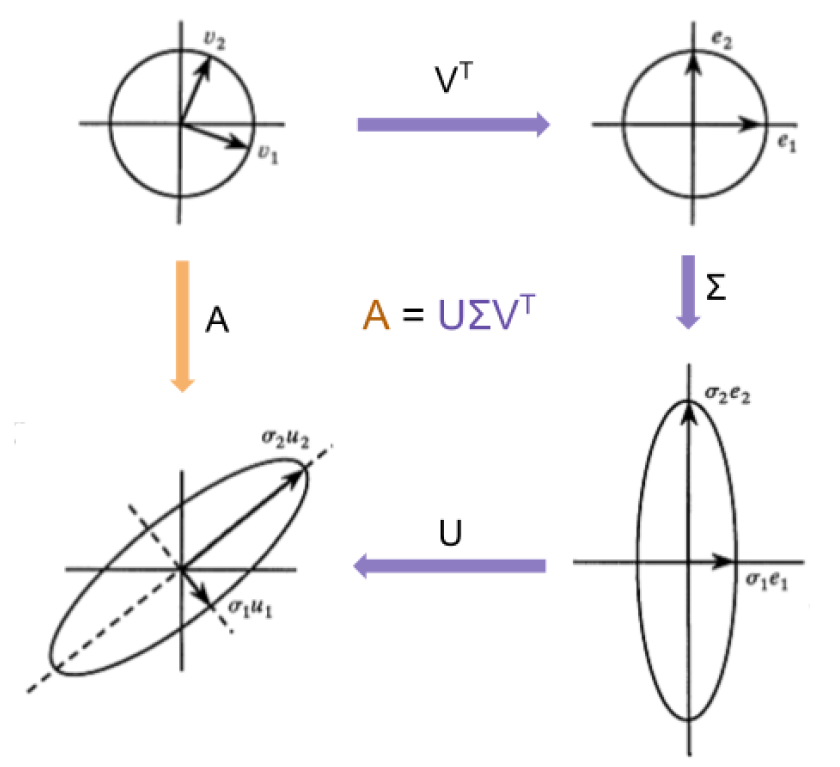
Geometry of SVD
- Start in $\R^n$ (or $\mathbb{C}^n$)
- Matrix $V^T$ rotates or reflects into coordinate system aligned with the “principal axes” of $A$
- Diagonal matrix $\Sigma$ then scales these directions by the singular values of $\sigma_i$
- The matrix $U$ then maps those scaled vector into $\R^m$ (or $\mathbb{C}^m$)
Conceptual Approach of SVD
- Eigenvalues of $A^TA$
- $\sigma_i$ of $A$ are square roots of eigenvalues of $A^TA$
- $\sigma_i^2$ are the eigenvaleus of $A^TA$
- Right Singular Vectors : Eigenvectors of $A^TA$
- columns of $V$ are thos eigenvectors of $A^TA$
- Left Singular Vectors : The columns of $U$ can be found as $U = AV\Sigma^{-1}$
- Example !
SVD terms of symmetric matrix
- Given real $m\times n$ matrix $A$
- $A^TA$ is an $n\times n$ symmetric matrix
- $AA^T$ is an $m\times m$ symmetric matrix
Forward Map x → Ax and Backward map y → ATy
- Forward map : ${\bf x}\in \R^n \rightarrow A{\bf x} \in \R^m$ : Forward mapping from $n$-dimensional domain to $m$-dimensional codomain
- Backward map : ${\bf y}\in \R^m \rightarrow A^T{\bf y} \in \R^n$ : Backward mapping from $m$-dimensional codomain to $n$-dimensional domain
- $A^TA$ : forward → backward - $\R^n \rightarrow \R^n$
- $AA^T$ : backward → forward - $\R^m \rightarrow \R^m$
Eigenvalues of $A^TA$ and the Right singular vectors $V$.
- Using positive-definiteness, ${\bf x}^T(A^TA){\bf x} = \vert\vert A{\bf x} \vert\vert ^2 \geq 0$ : all eigenvalues of $A^TA$ are positive or zero
- Because eigenvectors are orthonormal, $V^TV = I_{n\times n}$
Singular Values and the Diagonal matrix $\Sigma$
- Singular values $\sigma_i$ are square roots of eigenvalues of $A^TA$
- $\sigma_i = \sqrt{\lambda_i}$
- Typically arrange them in descending order
- for SVD factorization, these singular values go on the diagonal term of rectangular matrix $\Sigma$ of size $m \times n$
Left Singular Vectors $U$
- non-zero eigenvalue $\lambda_i$ of $A^TA$ is also eigenvalue of $AA^T$. Corresponding eigenvectors of $\R^m$ are left singular vectors of $A$.
- As long as $\sigma_i \neq 0$, ${\bf u}_i$ is well defined
15. Eigenspace
- Eigenspace corresponding to $\lambda$ is
- For each eigenvalue $\lambda$, the set of all vectors $\bf v$ that satisfies $A{\bf v} = \lambda {\bf v}$ forms a subspace of $\R^n$
- Every vector in $\varepsilon_\lambda$ gets stratched or compressed by factor $\lambda$
- $\dim(\varepsilon_{\lambda})$ : Geometric multiplicity : how many linearly independent eigenvectors are in that eigenvalue.
Finding an Eigenspace in practice
- Solve $(A-\lambda I){\mathbf v} = \bf 0$
- Find all solutions to this homogeneous system.
- Solution space is $\varepsilon_\lambda$
- Example !
16. Real eigenvalues of symmetric matrix
- If $A $ is an $n\times n$ real symmetric matrix $(A=A^T)$,
- All eigenvalues of $A$ are real
- $A$ is diagonalizable by an orthogonal matrix $Q$.
Example ! (QDQT decomposition (eigendecomposition) practice)
where $D$ is a diagonal matrix containing the real eigenvalues of $A$
- Consider energy or quadratic form, Considering Reyleigh quotient,
- Eigenvalues of symmetric matrix must be real
This post is licensed under CC BY 4.0 by the author.