[컴선설] Lec 04 Bezier Surfaces
[컴선설] Lec 04 Bezier Surfaces
1. Bezier Surface
\[{\bf s}(u, v) = \begin{bmatrix}x(u ,v) \\ y(u, v) \\ z(u, v)\end{bmatrix}\]- Each scalar (x, y, z) are parameterized with $u, v$
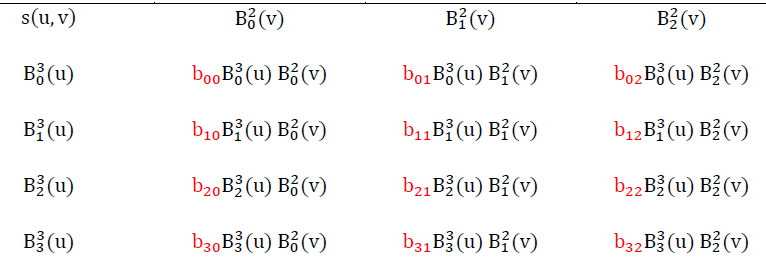
Bernstein basis function for surface
- $1 \times 1 = [(1-u)+u] \times [(1-v) + v]$
- $1^m \times 1^n= [(1-u)+u]^m \times [(1-v)+v]^n$
- Example!
- if $m=3, n=2$, number of terms = $(3+1) \times (2+1) = 12$
- Dividing s with $x(u, v), y(u, v), z(u, v)$
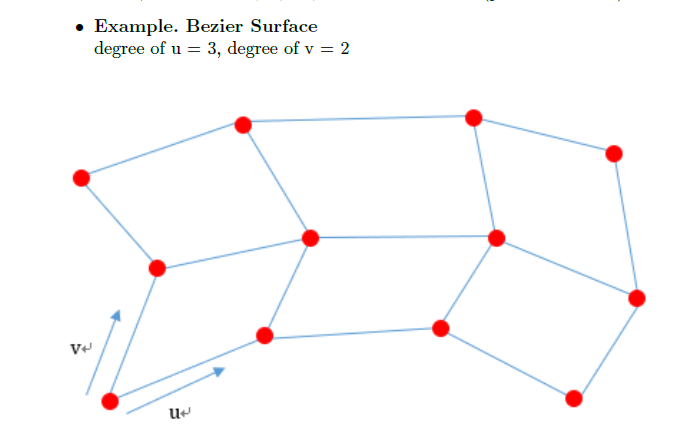
Procedure
- Connect the control points at the corresponding points to create a control polygon
- Create a Bezier Surface given the control polygon
2. De Castelijau algorithm for Bezier surface
- Two ways to approach : calculate $u$ first or $v$ first
- Example!
- $u$ → $v$ : $(3+2+1) \times 3 + (2+1) \times 1=21$
- $v $ → $u$ : $(2+1)\times 4 + (3+2+1) \times 1 = 18$
- To reduce the amout of computation, calculating parameters with a small degree first.
3. Convert monomial basis function to Bezier basis function for a surface
- Example !
- Consider $f(u, v) = 1+ 2u - u^2 +4v-2uv +2u^2v$
- degree of $u$ : 2, degree of $v$ : 1
- Differentiating both sides with respect to $u$ and $v$ are always valid. Figure each coefficient with this way, with substituting $u=0, v=0$ (identity)
Drawing a graph of a Bezier surface function
\[\begin{bmatrix} u \\ v \\f(u, v) \end{bmatrix}\]- Example (continued)
- with using sum-to-one property,
where
\[{\bf b_{ij}} = \begin{bmatrix}{i \over n} \\ {j \over m} \\ b_{ij}\end{bmatrix} = \begin{bmatrix}u \\ v \\f(u, v)\end{bmatrix}\]4. Local support
B-spline (Basis spline)
- Non-negativity
- Sum-to-one property
- Local support
- Same size of support [$u_i , u_{i+p+1}$)
Local support
- support : parameter area where the function value is not zero
- Local support : Parameter region where the function value is not 0 is local
- Global support : lots of nonzero..
- Local support is numerically stable and faster computation speed
5. Interpolation and Approximation
- Example !
- Residual $e_i = y_i - f(x_i)$
- Total residual is squared sum of residual
- Each term $a, b$ is determining by finding value that minimizes total residual function : ${\partial \varepsilon(a, b) \over \partial a}= 0, {\partial \varepsilon(a, b) \over \partial b}= 0$
Residual vs error
- error : $\vert\vert \hat x - x\vert\vert$
- residual : $\vert\vert A\hat x - b \vert\vert$
- if error is zero ($x=\hat x$) → $A\hat x = b$ (sufficient)
- if residual ($\vert\vert A\hat x -b \vert\vert = 0$) → $A\hat x = b$ (not always true, necessary)
6. Tangent vector
- Consider a bezier curve with degree $n$
- Degree of Bernstein basis decreased by 1, difference btw $i-1$ and $i$, $n$ omitted (recall differentiation of power series)
- Also $n$ omitted with decreasing degree of bernstein basis, index moved $(0, n)$ to $(0, n-1)$, note that $\Delta b_i = b_{i+1}-b_i$
Geometrical interpretation
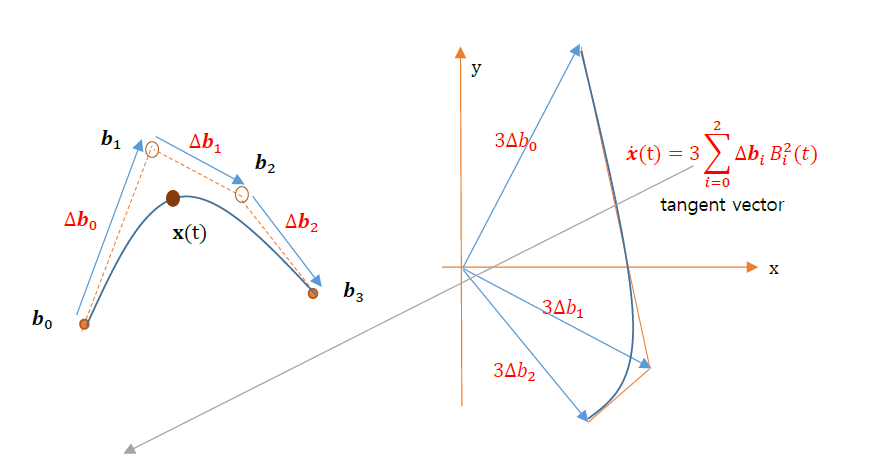
- Tangent vector is also a Bernstein with decreased degree, each control point is $n$ (original degree) times vector of original adjacent control points
- If the term satisfies (sum-to-zero) property : it is vector, (sum-to-one) property : it is point (on curve)
Application on higher order derivatives
\[{\bf x}''(t) = n(n-1) \sum_{i=0}^{n-2} \Delta^2b_i B_i^{n-2}(t)\]where $\Delta^2b_i = \Delta b_{i+1}-\Delta b_i = (b_{i+2} - 2b_{i+1} + b_i)$
each coefficient is ${n \choose m}(-1)^{n}$
Global tangent vector application
- consider a global spline $u\in[a, b]$
because, $t= {u-a\over b-a}$ by parameterization, ${dt\over du} = {1\over b-a}$
\[={1\over b-a} n\sum_{i=0}^{n-1}\Delta b_i B_i^{n-1}(t), \ t\in[0, 1]\] This post is licensed under CC BY 4.0 by the author.