[신호 및 시스템] Lec 04, 05 - Convolution, Impulse response
[신호 및 시스템] Lec 04, 05 - Convolution, Impulse response
Precaution
신호 및 시스템 (26 Spring)
Definition of convolution
- DT
- CT
- An arbitary LTI system can be obtained as the convolution of the input signal and the system’s impulse response
- General step-by-step calculation (Example on DT)
- given $n$
- Flip $h[k] \rightarrow h[-k]$
- Shift $h[-k] \rightarrow h[n-k]$
- Sum $\sum x[k]h[n-k]$ in respect to $k$
Convolution with impulse function
- $h[n] = \delta [n-n_0]$
- $y[n] = \sum_{-\infty}^\infty h[n-k]x[k] = \sum x[k]\delta[n-n_0-k]$
- $y[n]=x[n-n_0]$
Impulse Response
- Impulse response of system is a output when inputting $\delta(t)$ impulse function
Impulse response in LTI system (DT)
\[\begin{aligned}x[n] &= \cdots + x[-1]\delta[n+1] + x[0]\delta[n] + x[1]\delta[n-1] + \cdots \\ &= \sum_{k=-\infty}^\infty x[k]\delta[n-k] \end{aligned}\]- Sampling property of impulse function
- From linearity :
- From time invariance :
- Interpretation : for an arbitary input $x[n]$ and an LTI system with an impulse response $h[n]$, given output $y[n]$ is the convoluation of the input and the impulse response
Impulse response of LTI system (CT)
- say $\delta_{\Delta }(t) = \begin{cases}{1\over \Delta}, & 0\leq t < \Delta \ 0, & \text{else}\end{cases}$
- $H{\delta_{\Delta}(t)} = \hat h_{\Delta}(t)$
- Simular to sampling property of delta function, by linearity
- (by time invariance)
Linear Constant-Coefficient Differential Equation
- General form :
that is …
\[\sum_{k=0}^N a_ky^{(k)}(t) = \sum_{l=0}^M b_kx^{(l)}(t)\]- Particular solution (forced response)
- $y(t) = y_p(t), x(t) = x(t)$
- Homogeneous solution (natural response)
- $\sum_{k=0}^N a_k {d^k \over dt^k}y_h(t)=0$
- Overall solution : $y(t) = y_p(t) + y_h(t)$
- Since LCCDE is an LTI system, once we find $h(t)$ ( the particular solution for impulse input) → then $y(t) = x(t) * h(t) $for an arbitary input $x(t)$
LCCDE : Homogeneous solution
\[\sum_{k=0}^N a_k {d^k \over dt^k}y_h(t)=0\]- try $y_h(t) = Ae^{st}$
- $y_h(t) = Ae^{st}$ where $s$ is a solution for $\sum_{k=0}^N a_ks^k=0$ and $A$ can be any value
LCCDE : Particular solution
- Particular solution for input $e^{st}$
- Lets’s try $y_p(t) = Ae^{st}$ again.
and $y_p(t) = Ae^{st}$ is the particular solution of the ODE
LCCDE and LTI system
- We know this system is LTI
$x(t) = \sum_o \alpha_o e^{s_o t}$
\[y(t) = \sum_o A_o \alpha_o e^{s_ot}\]where
\[A_o = {\sum _{l=0}^N b_ls_o^l \over \sum _{k=0}^N a_k s_o^k}\]DT : Linear constant-coefficient difference equation
\[a_N y[n-N] + \cdots a_0 y[n] = b_Mx[n-M] + \cdots b_0 x[n]\] \[\sum_{k=0}^N a_k y[n-k] = \sum_{l=0}^M b_l x[n-l]\]we can put every term except for $y[n]$ at RHS
- Let $x[n] = \delta[n]$
Case I : $a_k=0 (k>0)$
\[y[n] = \sum_{l=0}^M {b_l \over a_0} \delta [n-l], h[n] = \begin{cases} {b_n \over a_0}, & 0 \leq n \leq N \\ 0, & \text{otherwise} \end{cases}\]- So-called FIR(FInite Impulse response)
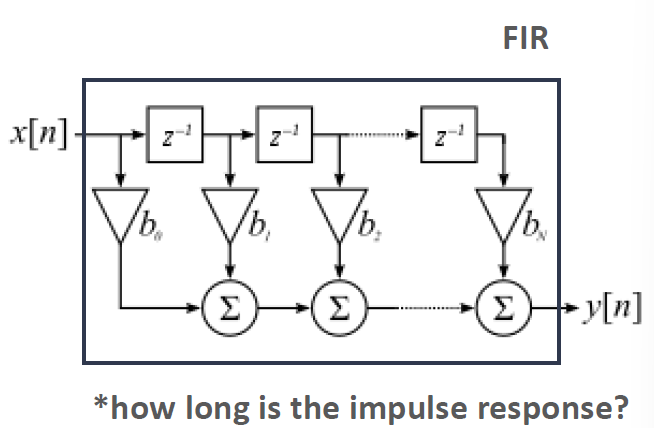
- The impulse response lasts for only $0\leq n\leq M$
- Feedforward : non-recursive
Case II : (general)
\[y[n] = {1\over a_0}\bigg[\sum_{l=0}^M b_l \delta[n-l] - \sum_{k=1}^N a_k y[n-k]\bigg]\]- The impulse response is not explicitly obtained.
- Infinite Impulse response ( the right summation term works as feedback)
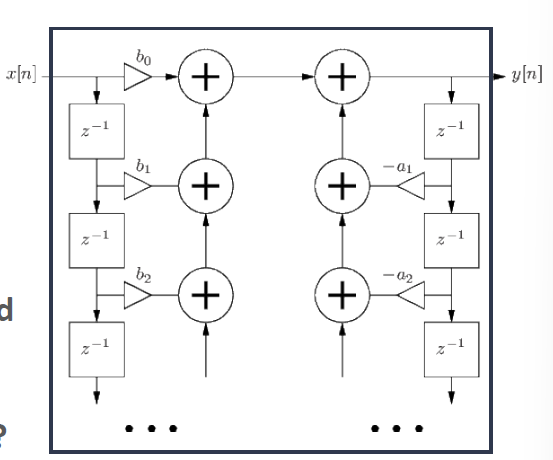
- Feedback (recursive)
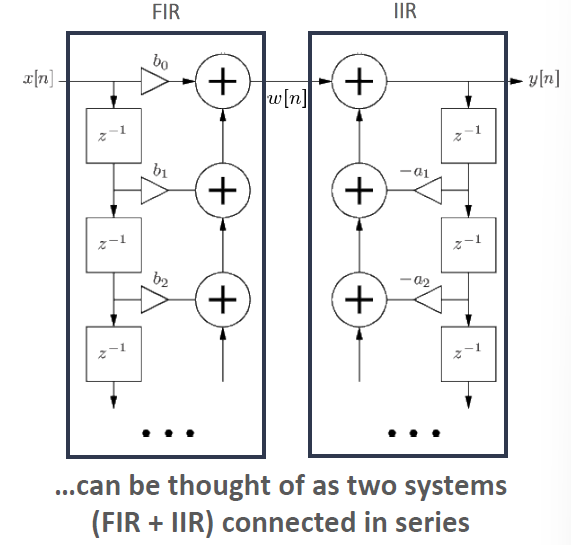
- Can be thought of as two systems (FIR + IIR) connected in series
Can IIR system have finite length output?
- Suppose the system has finite length output, which means
- Without loosing generality, we can set $a_0=1$
- Construct matrix, we can empty out Lower trianguler term, every pivot is nonzero → matrix A is invertible.
- for invertible matrix $A$, $Ax=0 \Leftrightarrow x=0$
- It contradicts the definition of IIR ($a_i=0$)
- → Any DT system with recursive path cannot have finite length output
This post is licensed under CC BY 4.0 by the author.