[신호 및 시스템] Lec 06, 07 - Properties of LTI system, Eigenfunction
[신호 및 시스템] Lec 06, 07 - Properties of LTI system, Eigenfunction
Precaution
신호 및 시스템 (26 Spring)
Properties of convolution
- Commutative property
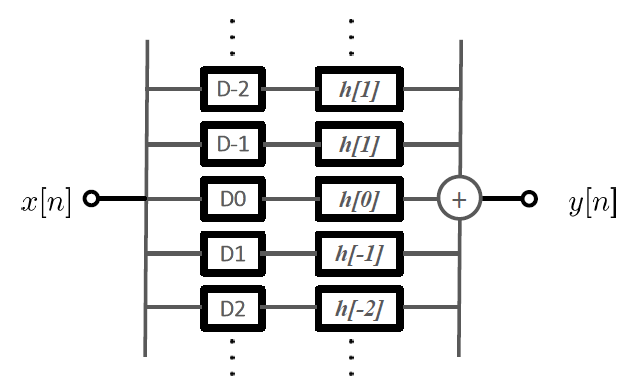
DT LTI system
- Make multiple copies of $x[n]$, give delays to the signal, add scalar multiplication with impulse reseponse of corresponding given delay, summation of all weighted delayed input is the output $y[n]$
- Distributive property
- Associative property : Don’t need to care about the order of calculation
LTI systems without memory
- Application to impulse response :
- Shape of impulse response must be impulse (since input of impulse response is impulse)
Causality of LTI systems
- Application to impulse response :
Invertibility of LTI systems
- If LTI system is invertible, then its inverse system is also LTI and also $g(t) * h(t) = \delta(t)$
- Think of Invertibility of function. i.e. $y=cos(t), y=x^2$ is not invertible
Stability of LTI systems
- Sum of impulse response over time is finite, the system is BIBO stable
- Proof :
- Therefore $\sum_{k=-\infty}^\infty \vert h[k]\vert <\infty$ is a sufficient condition for stability
- Therefore $\sum_{k=-\infty}^\infty \vert h[k] \vert <\infty$ is a necessary condition
(Complex) sinusoidal input to LTI system
- Let $x_1(t) = e^{j\omega t}, x_2(t) = e^{j\omega (t+a)}$
- Due to linearity,
$y_2(t) = y_1(t+a) = e^{j\omega a} y_1(t)$ ← Plug in $t=0$
$y_1(a) = e^{j\omega a} y_1(0), \therefore y_1(t) = y_1(0) e^{j\omega t}$
Eigenfunctions of LTI system
- Nonzero function $\phi(t)$ such that $H{\phi(t)} = \lambda \phi(t)$ for some scalar eigenvalue $\lambda$,
- $\phi(t)$ : Eigenfunction, $\lambda$ : Eigenvalue for corresponding eigenfunction
- $\lambda = y(0)$ is the corresponding eigenvalue for $x(t) = e^{j\omega t}$
This post is licensed under CC BY 4.0 by the author.